For our final project in Calc 3, we were tasked with writing a basic “research paper” with the crux of the work revolving around differential modeling. Being in a group with two other mechanical engineers, we decided to make our project about Formula 1 and finding the optimal racing line for a given track, under variable conditions. Although the drivers generally operate on a combination of experience, “feel”, sheer talent, and occasionally luck, being able to quantify the fastest theoretically possible lap time gives the driver the ability to know where they are able to push harder and where they are approaching the limit of their machinery in the conditions.
Formula 1 is the highest level of racing. It includes the most skilled drivers and the manufacturers develop unique, one off cars for this specific purpose, as opposed to other classes of racing where the cars are based off of street cars. Formula 1 has developed into a form of a professional sport. The season is around 8-9 months long and consists of roughly 22 races, or “grand prix’s.” there are 10 manufacturers with 2 drivers per team, totaling 20 cars in a race. Grand prix’s consist of two parts, qualifying, and the race itself. Qualifying determines the starting position of the cars for the race itself, and it is this qualifying session that we are going to be focusing on. Qualifying is where each driver goes out on the track, on their own, with no other cars on the track to set the fastest lap-time they possibly can without any interference. The slowest 5 are eliminated, and the process is repeated until the order is determined. We are focusing on this qualifying lap because there are no other drivers, or obstacles, to work around. It is just the car and the track.
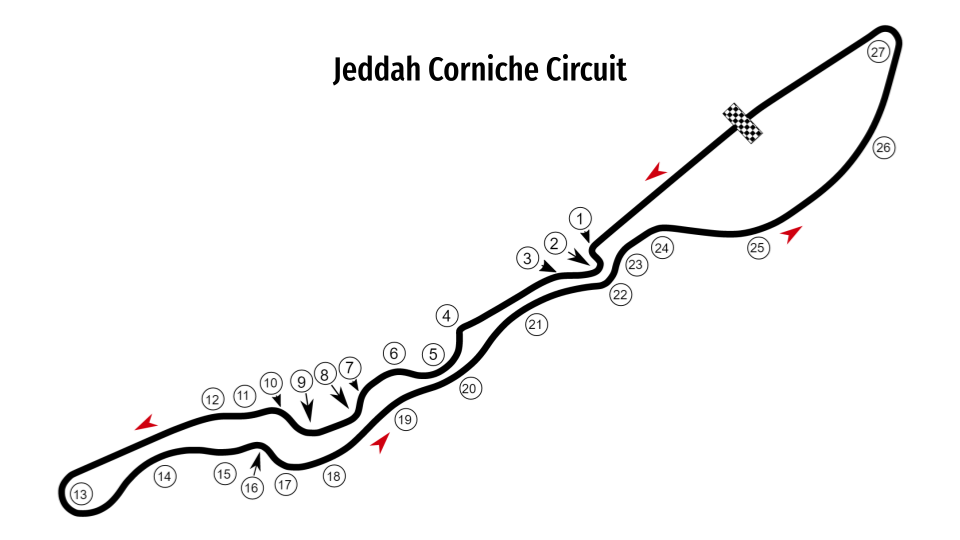
There is no standard track in Formula 1, each Grand Prix is held at a different track with different shapes.
Formula 1 tracks, and most racetracks, are made up of 3 parts. Corners, Straights, and chicanes, which are basically two corners lined up end to end.
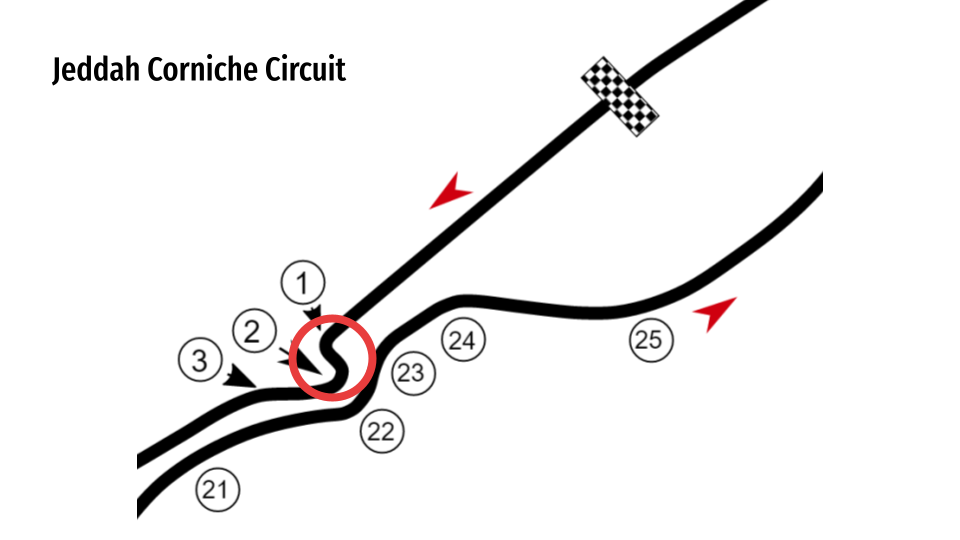
For the Jeddah Corniche circuit, we decided to focus on the first two corners. These border on the line between consecutive corners and a chicane.
For the purpose of this project, we are going to be isolating the three parts of the track into their own separate parts, although as you can see, there is a huge variation in the types of track geometry.
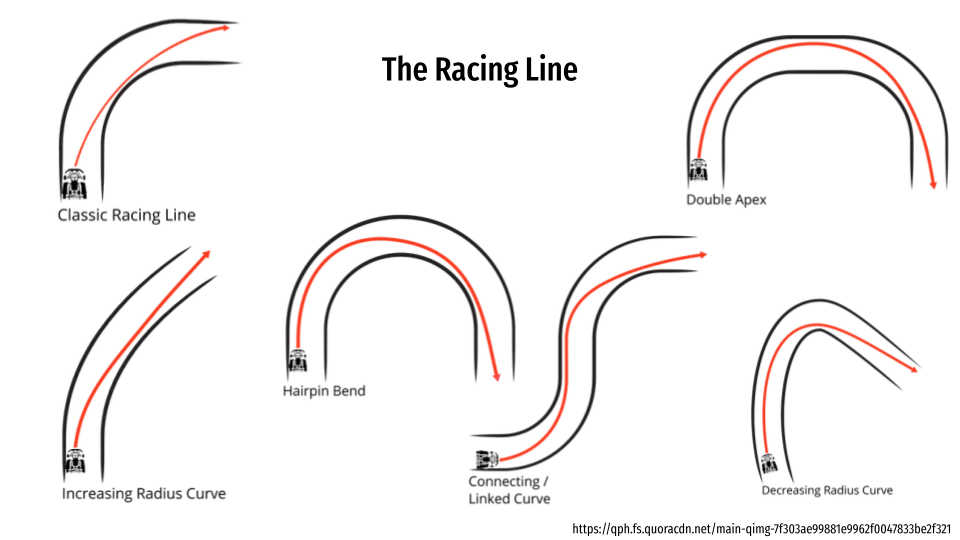
For corners, we are going to find the racing line which is the theoretical fastest path through a corner that a car can take.
Our output from a corner is an entry point and an exit point. We can connect the exit point of a preceding corner to the entry point of a subsequent corner with a straight line. As a result, we decided to focus solely on the path the car takes when cornering.
For chicanes, we will treat them as two corners end to end and run the discretization through the whole system.
The turn that we have selected, as mentioned earlier is the Jeddah Corniche Circuit.
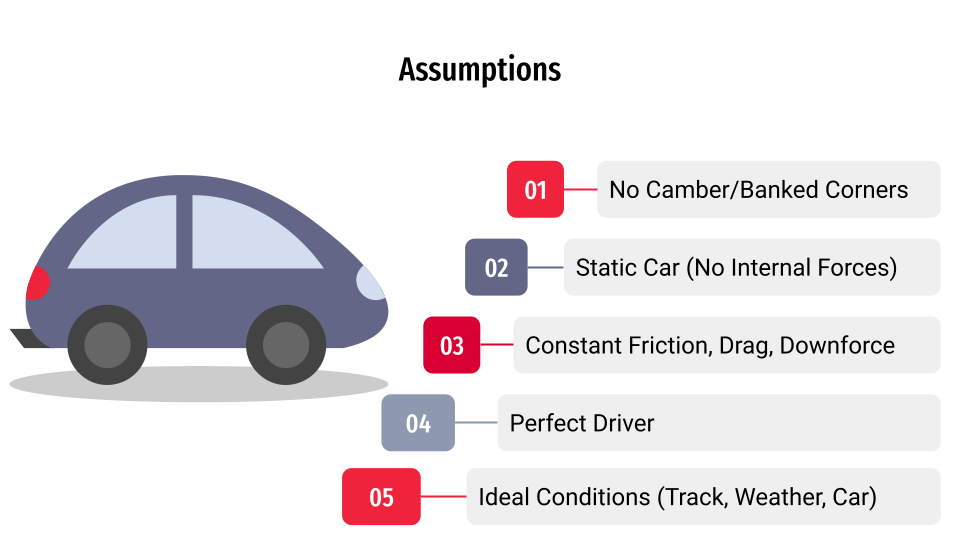
Camber is simply how banked a corner is. In Formula 1, most corners aren’t banked (for safety reasons)
We are concentrating all the forces on the car to the center of mass. This allows us to put everything in one equation and eliminate any torsional forces across the car, and allows us to assume that drag, lift, friction, and gravity all act at the same place. No torques or forces. In reality, these forces would reduce the efficiency of the car through the turn.
We are assuming that the coefficient of friction between the track and the tires is constant at all points on the track.
We are also assuming that the car conditions do not change (tires do not overheat, tires do not wear down).
Additionally, we are assuming that there is no slip between the tire and the track.
As a car goes through a corner, the aerodynamics change as a result of the air hitting the car at an angle, we are ignoring this change.
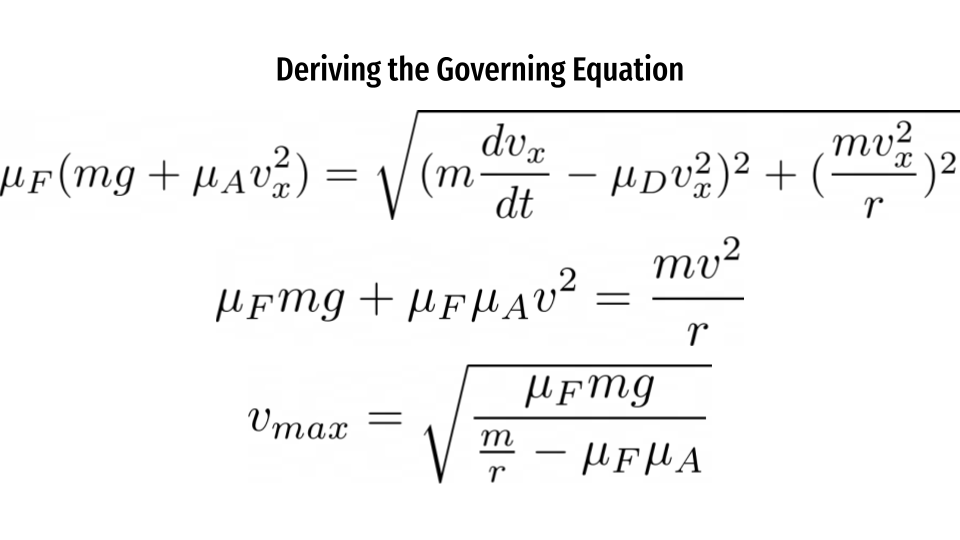
The above equation is the total level of grip provided to the car when going at a specific velocity.
The second equation is the lateral component, the force that prevents the car from losing traction and traveling along a circular path. This is dependent on the velocity.
The final basic equation is the maximum velocity that the car can travel through a set radius of corner.

In order to simplify the equations, we decided to roll our multiple variables into singular coefficients.
We used mu_a for the coefficient of aerodynamic negative lift, or downforce.
We used mu_d for the coefficient of aerodynamic drag
We used mu_f for the coefficient of friction, as is standard.
The values of these were taken from research papers that used CFD to simulate the parts
r is the radius of a discretized track segment, this will be more clear when we explain the track discritization.
Delta theta is the angular displacement (in radians) through the circle that can be formed by the radius r. If we were to drive in a circle, our angular displacement would be 2pi, as we would have a single segment.
M and g are the mass and gravitational constant.

As the variables were starting to get out of hand, we decided to sub in alpha, beta, gamma, and delta to simplify the equation.
After solving the differential equation for velocity, we used v = d/t substituting arclength for d. We solved the resulting equation for t.
As we weren’t able to create an analytical equation, we used Newton’s method as a method of approximation and ran 500 iterations.

Discretization of the track was tricky. Part of the reason we selected the first 2 corners from Jeddah, was that there was an overhead helicopter camera angle. After combing through footage, we were able to extract this frame, which shows cars going through the corner.
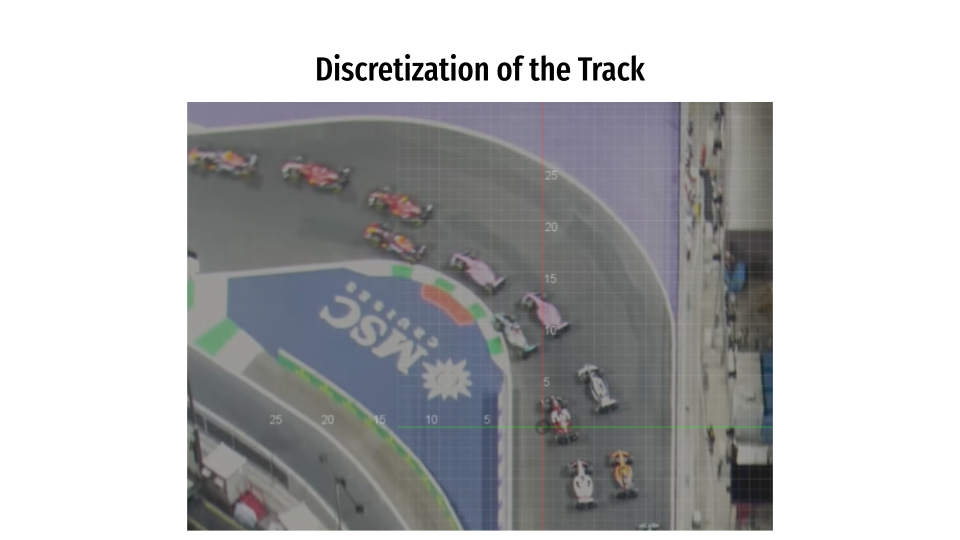
We removed the perspective and cropped the image in photoshop.
We then added the photo into Fusion 360, a CAD software that Vedansh is familiar with.
This allowed us to scale the photo based on the dimensions of the car, which are given in the FIA Formula 1 regulation manual.
We verified this through looking at multiple cars and adjusting the perspective.

Once we had the track, we created arcs, lines, and splines to define the track.
The track was then split up based on the discretization parameters.

Once the track was split up, Fusion 360 made it simple to extract the measurements that are relevant.
We were able to pull out the radius, the delta theta, and the change in radius as you move in and out of the track.
These measurements were loaded up into the matrix in the following slide.

We created a matrix that is, for this track, 9 by 40.
The nine rows represent the 9 possible positions that the car can start from, whereas the 40 columns is the 40 “steps” that the car can go through and make lateral adjustments.
Each cell in the matrix has the radius and delta theta for that individual segment of track.
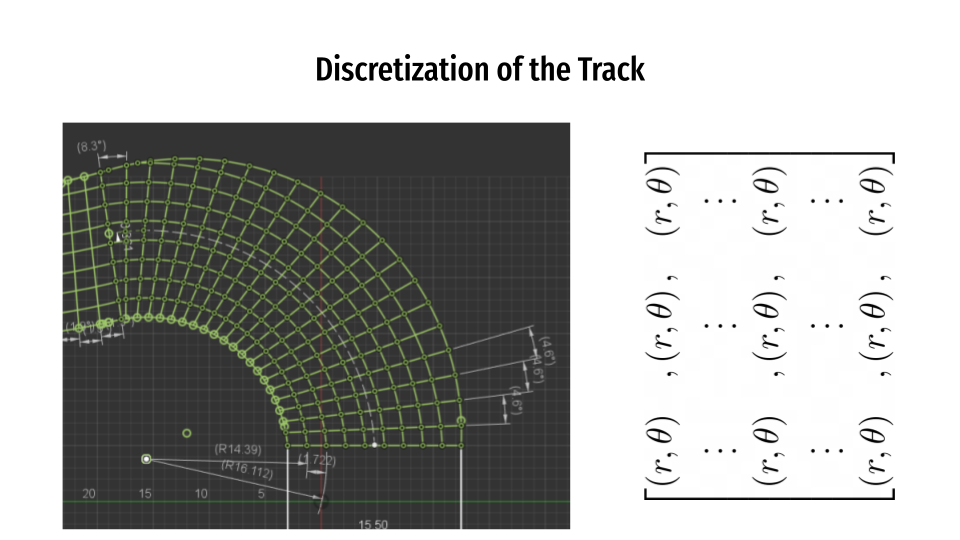
This helps to illustrate the representation of the track as a matrix.

For our current position on the track, we look at the next 3 cells that the car is able to travel to.
Each of the path’s have a different radius, which means that we can modulate our speed, however, we also have a longer distance to travel, which means that the shortest distance may not be the fastest.
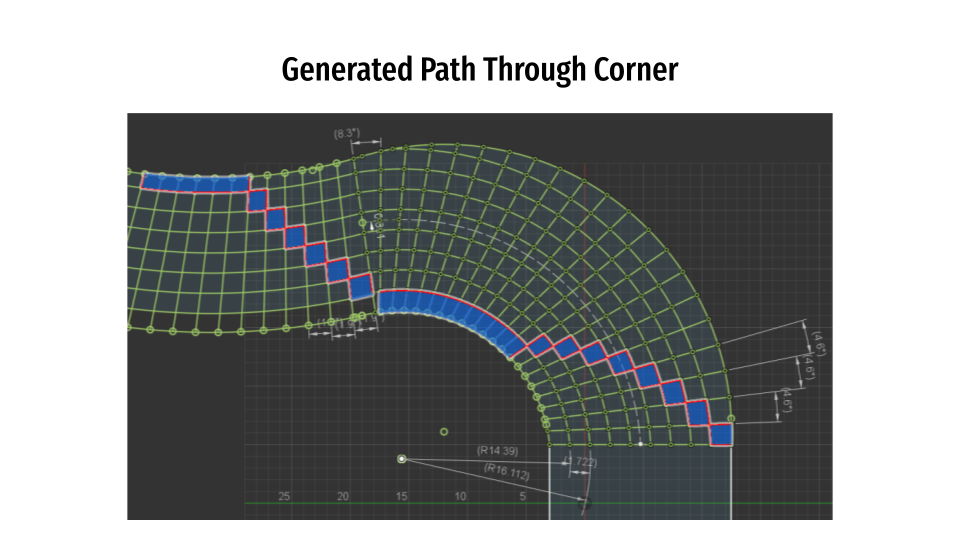
After running our model and mapping the output to this track, this was the outputted path. We start from the outside, and make a beeline for the inside. We then hug the inside and accelerate. As we approach the corner, we make a beeline for the apex of the next corner and accelerate once the corner finishes.

When comparing this behavior to the actual movements of a car, we find that the general path aligns with that of a Formula 1 car.
This top view differs from the optimal line as this photo is from the race on sunday as opposed to qualifying, which occurs the day before and has only 1 car on track.
Lewis Hamilton's Pole Lap | 2021 Saudi Arabian Grand Prix | Pirelli
Lewis Hamilton is widely considered one of (if not the) greatest drivers of all time, here is a video of his recording setting pole lap from 2021.

*1 - Ideal Car - This time is expected to be lower than the actual. However, as we are within the expected range, our highly simplified model is representative of real world conditions.
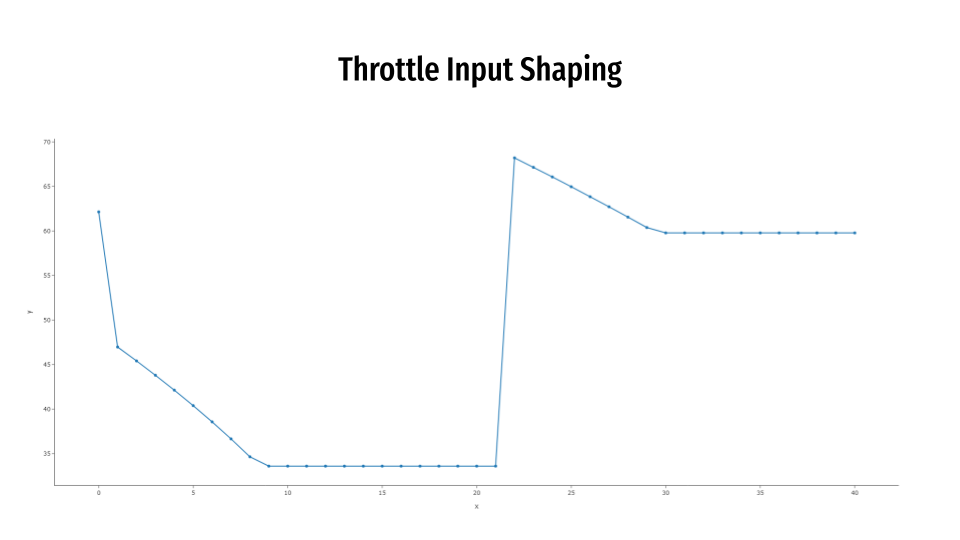
As we come into the corner, the driver starts to decelerate the car, this is the first slope (here).
Next, as the driver turns the corner, they try to maintain their speed.
During the time they are going from 1 corner to either the next, they put their foot on the accelerator for a split second, then they repeat this behavior.
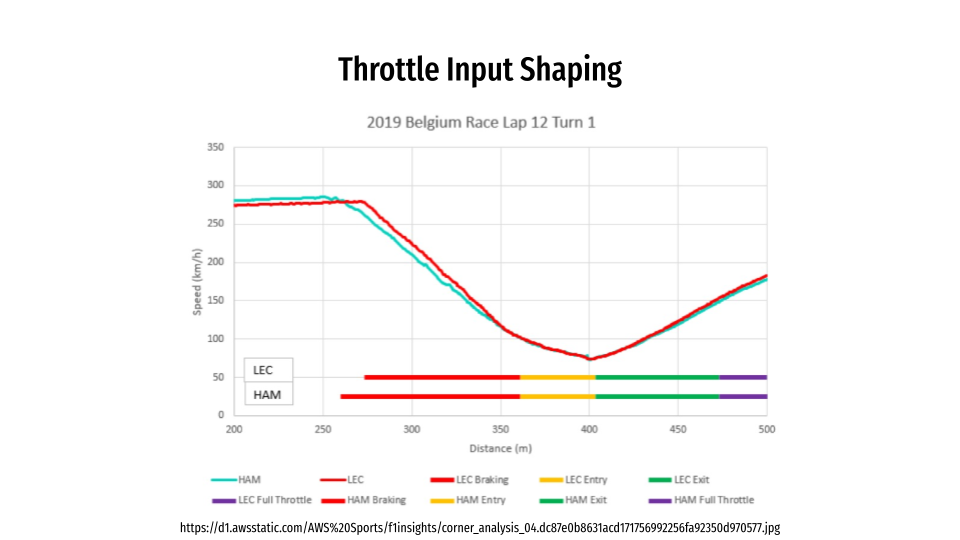
This behavior can be seen in this diagram. As they enter the corner, they decelerate, have a mostly constant speed through the corner, and then accelerate coming out of the corner.
https://aws.amazon.com/f1/corner-analysis/
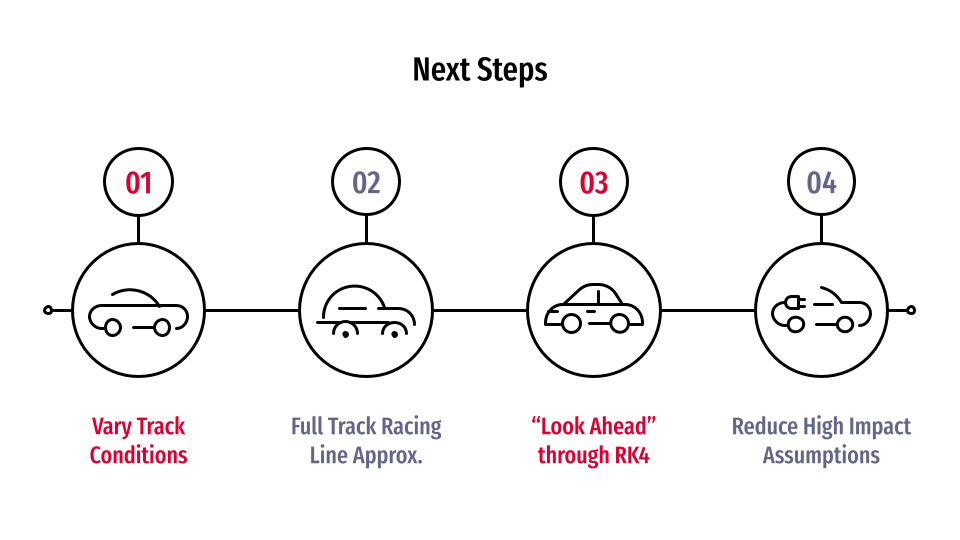
There is a lot that we can continue to do with this project.
We can vary the track conditions at each discrete point. As a track gets worn in, the rubber embeds itself onto the track, creating a literal line with significantly higher grip, this also creates loose rubber on the outside of the track. Weather plays a critical role in F1, being able to adapt to differing conditions gives a driver a huge edge.
We can discretize a full F1 track, this will allow us to get a “best path” through an entire track rather than a single corner.
At the moment, we are only making our next point based on what is immediately available and what is immediately fastest. Using RK4 (runge-kutta), we can effectively test every possible path through the track, allowing us to get the most optimal line, even if we must make sacrifices in specific areas to gain a larger advantage in another.
Many of our assumptions have a high impact on the efficacy of the model, by including a greater degree of vehicle dynamics, we can make further track optimizations. The logical next step is to accurately model 4 wheels rather than a single.

https://github.com/VedanshGoenka/Calc3FinalProject
Some funny memes....:P